

SLAM是Simultaneous Localization and Mapping的首字母缩写,它是一种同时估计自己的位置(明确自己的位置)和掌握周围环境的结构(创建环境地图)的技术,作为汽车自动驾驶和机器人自主操作所必需的技术之一一直以来都格外受到人们的关注。
近年来,从节省人力和提高效率的角度出发,智能工厂越来越受到企业,特别是制造业和物流业的关注,被称为AGV(自动导向车)和AMR(自动移动机器人)的移动机器人的需求在不断增长。在工厂中AGV或者AMR可以自主搬运零件和材料,或者在仓库中分拣物品并将其运送到卡车等的物流平台上。到目前为止,AGV的主流是在地板上贴上磁性宽带等形成跑道的形式,从而起到引导机器人的作用,这种方式需要花费成本和时间。而使用了SLAM技术之后,人们对AGV和AMR的应用寄予了新的期望,因为这种技术可以不需要向导磁条,即使在环境复杂改变的情况下,也可以让搬运机器人轻松地改变跑道进行作业。
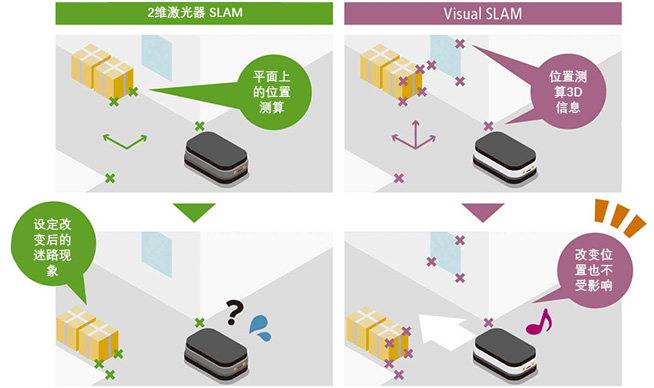
用于无导向AGV的SLAM技术主要有两种:Vision系统和LiDAR系统。 在LiDAR系统方法中,主要是通过用激光照射周围的结构来测量其形状。因此,它几乎不受照明的影响,即使在黑暗的地方也可以测量环境状态进行作业。但由于成本的关系,这种技术通常都是仅在水平方向上带有扫描的传感器,因此所获得的信息仅限于二维平面上;当然它也可以做到三维环境扫描,但是成本就会非常昂贵。此外,还有一个问题,就是当没有足够的线索(特征点)来帮助机器人估计自己的位置时,它就需要在跑道周围安装一个三维物体来添加线索,帮助其扫描传感器进行作业。
日本的佳能公司目前正在开发的Vision系统的Visual SLAM技术,通过在传感器中使用相机,可以实现低成本和高精度测量。众所周知,佳能一直以来都在镜头和相机领域领先于世界,如今,佳能公司也在利用自身优势特点,用于新技术研发。由于空间中的结构可以通过独特的分析技术以摄像机的图像为基础进行三维识别,因此佳能公司的SLAM技术可以将平面物体(如贴在墙上的海报)作为估计自身位置的线索。因此,它不需要像LiDAR方式那样安装立体物体,这样一来,移动机器人就可以在更多的场景中使用。此外,Vision系统还可以将摄像机的图像用于Visual SLAM以外的图像识别等,因此有可能在未来提供更多的附加值,如各种服务机器人和无人机等。
从立体摄像机的影像制作三维地图
SLAM技术使用不同类型的传感器来估计自身位置。佳能利用自己开发的视频分析软件“Vision-based Navigation Software for AGV”分析左右立体摄像机获得的视频,实时创建三维地图数据,并自动更新数据。通过接收使用这些高精度环境地图数据计算出的精确自我位置信息,机器人可以自主移动,而不依赖于人类的指令。
即使在不断变化的环境中也能以高精度运行
在工厂和物流仓库,各种物资和货物在工作过程中可能会不断更换位置,AGV周围的情况每时每刻也都在变化。在这些地方,有必要检测发生变化的地方,并适当地更新环境地图。二维LiDAR系统的信息很少,经常不知道哪里发生了变化。即使是Vision系统,由于缺乏三维立体参照点而无法处理信息,无法在环境地图上实时反映所有变化,AGV也经常停止。而佳能公司的Visual SLAM技术通过先进的分析能力和软件设计,使大量的信息能够在较短的处理时间内处理,甚至在价格低廉的计算机上处理,并可以实时更新环境地图信息,即使在周围环境变化剧烈的情况下,如AGV无法实现的地方,也能实现自动驾驶,这一新技术特征开始受到各行业的高度重视和评价。
Visual SLAM技术的发展背后,是佳能公司从上世纪90年代开始进行研发的MR(混合现实)技术的积累。在头戴式显示器(HMD)中,佳能公司应用了快速,准确的自定位估计技术和三维空间抓取技术,以实时融合现实世界和虚拟世界,从而完成了其自己的Visual SLAM系统。我们在目前国内的一些智能工厂或者仓储物流中看到的移动自主作业机器人大多需要使用轨道或者地上引导装置,佳能公司的技术发展有望突破这种状态。









